நிச்சயதார்த்தம் என்றால் என்ன. பணி ஆணை
பக்கம் 1
கொடுக்கப்பட்ட கியருக்கான நிச்சயதார்த்த கோணம் ஒரு நிலையான மதிப்பு.
நிச்சயதார்த்த கோணம் - மையக் கோட்டிற்கு செங்குத்தாக நிச்சயதார்த்தக் கோட்டால் உருவாகும் கோணம்.
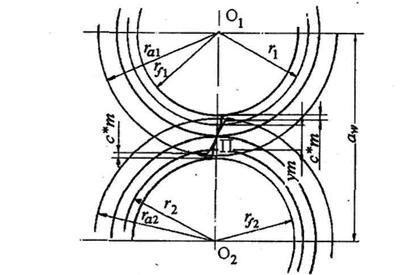
நிச்சயதார்த்தத்தின் கோணம் மற்றும் மைய தூரம் மாறாது, சுருதி வட்டத்துடன் கியர் பல்லின் தடிமன் அதிகரிக்கிறது, மற்றும் வீல் டூத்தின் தடிமன் அதே அளவு குறைகிறது. கியரின் புரோட்ரூஷன்கள் மற்றும் தாழ்வுகளின் சுற்றளவுகளின் விட்டம் அதிகரிக்கிறது, அதற்கேற்ப சக்கரம் குறைகிறது. பிட்ச் மற்றும் பிட்ச் வட்டங்கள் ஒரே மாதிரியானவை.
ஒரு ஸ்பர் கியரின் நிச்சயதார்த்த கோணம் கியரின் அச்சுக்கு செங்குத்தாக ஒரு விமானத்தில் மட்டுமே நடைபெறுகிறது. ஒரு ஹெலிகல் கியரில், நிச்சயதார்த்த கோணங்கள் மூன்று விமானங்களில் அமைந்துள்ளன.
நிச்சயதார்த்த கோணமானது ரேக் சுயவிவரத்தின் கோணத்திற்கு சமமாக இருக்கும், சக்கர அச்சுக்கு ரேக் இருக்கும் தூரத்தைப் பொருட்படுத்தாமல், ஒரு ஜோடி இனச்சேர்க்கை சக்கரங்களின் மைய தூரம் மாறும்போது, பின்வரும் உறவின்படி நிச்சயதார்த்த கோணம் மாறுகிறது: r மற்றும் r2 ஆகியவை இணைந்த ஜோடியின் முக்கிய வட்டங்களின் ஆரங்கள்.
ஷேவிங்கின் போது நிச்சயதார்த்த கோணம், ஷேவரின் சுயவிவரக் கோணத்திற்கு சமம், பிந்தையதை மறுசீரமைக்கும் போது மாறாது; எனவே, ஷேவர்களின் பற்களின் பரிமாணங்கள், ஷேவர்களின் உடைகளின் அளவைப் பொருட்படுத்தாமல், நிலையானதாக இருக்க வேண்டும்.
இரண்டு ஈடுபாட்டின் கோணம் என்பது முக்கிய வட்டங்களுக்கான பொதுவான தொடுகோடு மற்றும் மையங்களின் கோட்டிற்கு செங்குத்தாக இருக்கும் நேர்கோட்டுக்கு இடையே உள்ள கோணமாகும். ஈடுபாட்டிற்கு, நிச்சயதார்த்த கோணம் இல்லை.
இறுதி நிச்சயதார்த்த கோணம் சக்கரத்தின் சுழற்சியின் அச்சுக்கு செங்குத்தாக அல்லது சக்கரத்தின் இறுதி முகத்திற்கு இணையாக ஒரு விமானத்தில் அமைந்துள்ளது. சாதாரண நிச்சயதார்த்த கோணம் சக்கர அச்சுக்கு சாய்வாக அமைந்துள்ள பற்களின் கோட்டிற்கு செங்குத்தாக ஒரு விமானத்தில் அமைந்துள்ளது. இந்த கோணம் கியர் கணக்கீடுகள் மற்றும் வரைபடங்களில் பயன்படுத்தப்படுகிறது. சக்கரத்தின் சுழற்சியின் அச்சின் விமானத்தில், நிச்சயதார்த்த கோணம் அச்சு என்று அழைக்கப்படுகிறது. இந்த விமானத்தில் உள்ள கோணங்கள் பயன்படுத்தப்படுகின்றன, உதாரணமாக, ஒரு பெரிய ஹெலிக்ஸ் கோணம் கொண்ட புழுக்களில். நடைமுறையில், ஒரு ஜோடி கியர்களின் நிச்சயதார்த்த கோணம் கியரின் நோக்கத்தின் அடிப்படையில் வடிவமைப்பாளரால் தேர்ந்தெடுக்கப்படுகிறது. பம்ப் கியர்களில் பெரிய ஈடுபாடு கோணங்கள் (25 - 30e) பயன்படுத்தப்படுகின்றன. நிச்சயதார்த்தத்தின் கோணத்தில் அதிகரிப்புடன், பற்களின் வலிமை அதிகரிக்கிறது, மேலும் நிச்சயதார்த்தத்தின் கோணத்தில் குறைவு சத்தம் அளவைக் குறைக்க உதவுகிறது.
வழக்கமாக நிச்சயதார்த்த கோணம் a r அறியப்படுகிறது. இதன் விளைவாக, சமன்பாட்டில் கொடுக்கப்பட்ட Zj மற்றும் ga க்கு (14l), D மற்றும் A ஆகியவை தெரியவில்லை. எதிர்காலத்தில், சமன்பாட்டிலிருந்து (14l) D, அல்லது A இன் மதிப்புகளில் ஒன்றைக் கொடுத்தால், நாம் மற்றொரு மதிப்பைத் தீர்மானிக்கிறோம்.
4. கியர்
கியர்கள் நவீன இயந்திரங்களின் மிகவும் பொதுவான கூறுகள் மற்றும் அவற்றின் தரம் மற்றும் போட்டித்தன்மையை பெரும்பாலும் தீர்மானிக்கின்றன. கோண வேகங்களின் கொடுக்கப்பட்ட விகிதத்துடன், பொறிமுறையின் ஒரு தண்டிலிருந்து மற்றொன்றுக்கு சுழற்சி மற்றும் முறுக்குவிசையை மாற்றுவதற்கு அவை வடிவமைக்கப்பட்டுள்ளன. நவீன இயந்திரப் பொறியியலில் மிகவும் பரவலாகப் பயன்படுத்தப்படுவது இன்வால்யூட் கியர்கள். அவை கச்சிதமான தன்மை, அதிக செயல்திறன், நிலையான கியர் விகிதம், நம்பகமான செயல்பாடு, அதிக ஆயுள் மற்றும் எளிதான பராமரிப்பு ஆகியவற்றால் வகைப்படுத்தப்படுகின்றன.
இயந்திரங்கள், பொறிமுறைகள் மற்றும் இயக்கி அமைப்புகள் பல்வேறு கியர்களின் கட்டமைப்பு திட்டங்களுடன் சேர்ந்துள்ளன. வெளிப்புற மற்றும் உள் கியரிங் கொண்ட எளிய கியர்களின் பல்வேறு சேர்க்கைகளின் அடிப்படையில் அவை உருவாக்கப்படுகின்றன. எளிமையான பரிமாற்றங்களின் எண்ணிக்கை மற்றும் அவற்றின் இணைப்புகளுக்கு இடையிலான இணைப்புகளை இணைத்து, தேவையான பண்புகளுடன் சிக்கலான பல-திரிக்கப்பட்ட மற்றும் பல-நிலை பரிமாற்றங்களைப் பெறலாம். சுருக்கம் மற்றும் குறைந்த நிறை, பல-திரிக்கப்பட்ட கிரக கியர்கள் பரவலாகிவிட்டன, அதே போல் மற்ற கியர்கள் மற்றும் சாதனங்களுடன் அவற்றின் சேர்க்கைகளின் அடிப்படையில் கட்டப்பட்ட மிகவும் சிக்கலான இயக்கிகள்.
4.1 கியர்களின் தொகுப்பு
4.1.1. நேரான பற்களின் வடிவியல் அளவுருக்கள்
உருளை
கியர்கள்
ஒரு ஸ்பர் கியரின் வடிவியல், உற்பத்தி செய்யும் ரேக் மூலம் இயந்திர ஈடுபாட்டில் வெட்டப்பட்ட சக்கரங்களைக் கொண்டது, பின்வரும் அளவுருக்களால் முழுமையாக தீர்மானிக்கப்படுகிறது: z 1, z 2, மீ, ஒரு, ஹெக்டேர்*, உடன்*, ρ*, எக்ஸ் 1, எக்ஸ் 2, எங்கே z 1, z 2 - சக்கரங்களின் பற்களின் எண்ணிக்கை;
மீ- பல் தொகுதி; ஒரு, ஹெக்டேர்*, உடன்*, ρ* என்பது ஆரம்ப உருவாக்கும் சுற்றுகளின் அளவுருக்கள், முறையே சமம் (GOST): சுயவிவர கோணம் α = 20 °; தலை உயரம் காரணி ஹெக்டேர்* = 1, ரேடியல் கிளியரன்ஸ் காரணி உடன்* = 0.25, மாற்றம் வளைவு ஆரம் குணகம் ρ = 0.384; எக்ஸ் 1, எக்ஸ் 2 என்பது ஆரம்ப உருவாக்கும் சுற்றுகளின் இடப்பெயர்ச்சி குணகம், இது கியர் ரயிலின் குறிப்பிட்ட இயக்க நிலைமைகள் மற்றும் அதற்கான தேவைகளைப் பொறுத்து தேர்ந்தெடுக்கப்படுகிறது.
கியர்களின் வடிவியல் அளவுருக்கள்
உற்பத்தி செய்யும் ரேக் (படம் 4.1) உடன் வெட்டு சக்கரத்தின் இயந்திர ஈடுபாட்டின் கருத்தில் இருந்து தீர்மானிக்கப்படும் கியர் சக்கரத்தின் முக்கிய பரிமாணங்கள் பின்வருமாறு.
ப =π மீ. (4.1)
சுருதி வட்டம் ஆரம் ஆர்சமத்துவம் 2π இலிருந்து வரையறுக்கிறோம் ஆர் =ஆர் 0z:
http://pandia.ru/text/78/354/images/image003_70.gif" width="196" height="52"> (4.3)
தாழ்வு வட்டத்தின் ஆரம்rf.
வெட்டப்பட்ட சக்கரத்தின் இடைவெளிகளின் மேற்பரப்பு உற்பத்தி செய்யும் ரயிலின் பல்லின் மேற்புறத்தில் உருவாகிறது, எனவே, இடைவெளிகளின் சுற்றளவின் ஆரம் இருக்கும் (படம் 4.1)
http://pandia.ru/text/78/354/images/image006_42.gif" width="183" height="36"> (4.4)
ஆஃப்செட் இல்லாமல் வெட்டப்பட்ட சக்கரங்களுக்கு ( x= 0),
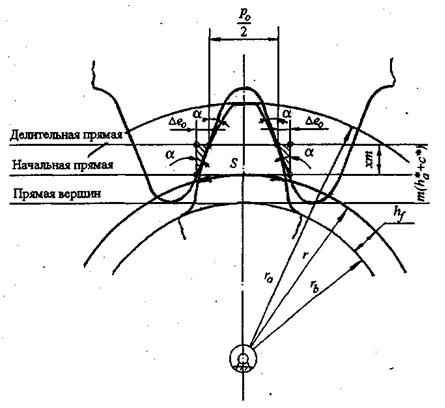
பல் தடிமன் பிரித்தல்எஸ்.
பல் தடிமன் எஸ்பிளவு வட்டம் சேர்த்து ஆரம்ப நேர் கோடு (படம். 4.2) சேர்த்து lath குழி அகலம் சமமாக உள்ளது.
இந்த வழியில், ![]() . (4.5)
. (4.5)
ஆஃப்செட் இல்லாமல் வெட்டப்பட்ட சக்கரங்களுக்கு, .
அரிசி. 4.2 பல்லின் பிளவு தடிமன் தீர்மானிக்க
ஒரு தன்னிச்சையான வட்டத்தில் பல் தடிமன்.
அத்திப்பழத்திலிருந்து. 4.3 எழுதலாம்
http://pandia.ru/text/78/354/images/image012_23.jpg" width="494" height="337">
அரிசி. 4.3. ஒரு தன்னிச்சையான வட்டத்தில் பல் தடிமன் தீர்மானித்தல்
சுற்றளவு மூலம் பல்லின் கோண தடிமன் வெளிப்படுத்துகிறது, நாம் பெறுகிறோம்
http://pandia.ru/text/78/354/images/image014_21.gif" width="224" height="63 src=">. (4.6)
பல் சுயவிவர கோணம் http://pandia.ru/text/78/354/images/image016_16.gif" width="89" height="55">. (4.7)
கியர்களின் வடிவியல் அளவுருக்கள்
ஈடுபாட்டின் கோணம்α டபிள்யூ
கோட்பாட்டு நிச்சயதார்த்தம் பற்களுக்கு இடையில் எந்த பின்னடைவும் இல்லை.
எனவே அது பின்வருமாறு SW 1=இவ் 2 மற்றும் இவ் 1= SW 2, மற்றும் முதல் SW 1+ இவ் l= pw, பின்னர் (படம் 4.4)
![]() . (4.8)
. (4.8)
http://pandia.ru/text/78/354/images/image019_15.gif" width="240" height="57">, (4.9)
 . (4.10)
. (4.10)
(4.9) மற்றும் (4.10) வெளிப்பாடுகளை (4.8) மாற்றினால், நாங்கள் பெறுகிறோம்
http://pandia.ru/text/78/354/images/image022_14.gif" width="111 height=48" height="48">. (4.12)
![]() . (4.13)
. (4.13)
http://pandia.ru/text/78/354/images/image025_12.gif" width="360" height="57">

எளிய மாற்றங்களுக்குப் பிறகு, நாம் பெறுகிறோம்
 (4.15)
(4.15)
பூஜ்ஜிய கியர்களுக்கு எக்ஸ்Σ = 0, inv a டபிள்யூ= inv α, அதாவது நிச்சயதார்த்த கோணம் அசல் விளிம்பின் (20°) சுயவிவரக் கோணத்திற்குச் சமம்.
சுருதி வட்டங்களின் ஆரங்கள்
வலது முக்கோணங்களில் இருந்து O1M1II மற்றும் O2M2P (படம் 4.4) வரையறுக்கிறோம்
 (4.16)
(4.16)
பூஜ்ய பரிமாற்றங்களுக்கு http://pandia.ru/text/78/354/images/image031_9.gif" width="261" height="52"> (4.17)
பூஜ்ஜிய கியர்களுக்கு, மைய தூரம் சுருதி மைய தூரத்திற்கு சமமாக இருக்கும் அ:
![]() (4.18)
(4.18)
உச்சி வட்டம் ஆரங்கள்
இந்த ஆரங்கள் தேவையான ரேடியல் கிளியரன்ஸ் பெறுவதற்கான நிபந்தனையிலிருந்து தீர்மானிக்கப்படுகின்றன உடன்கியரில். இந்த இடைவெளி பொதுவாக சமமாக எடுக்கப்படுகிறது
உடன்= உடன்*மீ, c*=
0,25.
அத்தி படி. 4.5 எழுதலாம்
கியர் வடிவவியலைக் கணக்கிடுவதற்கான GOST இல், செங்குத்துகளின் வட்டங்களின் ஆரங்கள் சமநிலை இடப்பெயர்ச்சி குணகங்கள் மூலம் தீர்மானிக்கப்படுகின்றன Δ ஒய்:
எங்கே y -உணரப்பட்ட இடப்பெயர்ச்சி குணகம் சமம்
இங்கே ut -கியர் சக்கரங்களின் சுருதி வட்டங்களுக்கு இடையே உள்ள மிகச்சிறிய தூரத்திற்கு சமமாக உணரப்பட்ட இடப்பெயர்ச்சி.
அரிசி. 4.5 செங்குத்து வட்டத்தின் ஆரம் வரையறைக்கு
ஜீரோ கியர்களுக்கு http://pandia.ru/text/78/354/images/image039_5.gif" width="179" height="35"> (4.19)
மற்றும் ஆஃப்செட் இல்லாத கியர்களுக்கு ( எக்ஸ் 1,2 = 0)
முழு உரையைப் பெறவும்http://pandia.ru/text/78/354/images/image041_6.gif" width="144" height="28 src=">
இதில் ρpr என்பது வளைவின் குறைக்கப்பட்ட ஆரம் ஆகும்; ρ1, ρ2 என்பது முதல் மற்றும் இரண்டாவது சக்கரங்களின் உள்ளடக்கிய பல் சுயவிவரங்களின் வளைவின் ஆரங்கள் ஆகும்.
நிச்சயதார்த்த கோணம் பெரியது, சிறிய வளைவு குறைகிறது, அதிக அளவுகள்தொடர்பு பகுதிகள், மற்றும் அதன் விளைவாக, குறைவான தொடர்பு அழுத்தங்கள் மற்றும் பற்களின் மேற்பரப்பு அடுக்குகளின் சோர்வு சிப்பிங் ஆபத்து. இடப்பெயர்வுகளின் கூட்டுத்தொகையின் குணகத்தின் அதிகரிப்புடன் ஈடுபாட்டின் கோணம் அதிகரிக்கிறது.
· சிராய்ப்பு உடைகள் மற்றும் பற்கள் நெரிசல்.பற்களின் பக்க மேற்பரப்புகள் சறுக்கி அவற்றின் சறுக்கலின் வேகத்தைப் பொறுத்தது, இது சூத்திரத்தால் தீர்மானிக்கப்படும் போது பற்களின் சிராய்ப்பு தேய்மானம் மற்றும் நெரிசல் ஏற்படுகிறது.
http://pandia.ru/text/78/354/images/image043_7.gif" width="376" height="40 src=">.
செயலில் உள்ள நிச்சயதார்த்தக் கோட்டின் நீளத்தின் அதிகரிப்புடன் இறுதி ஒன்றுடன் ஒன்று குணகம் அதிகரிக்கிறது, இது நிச்சயதார்த்த கோணம் α குறைவதால் அதிகரிக்கிறது. டபிள்யூ, அதாவது, மொத்த சார்பு குணகத்தின் குறைவுடன்.
4.1.3. சார்பு காரணிகளின் தேர்வு
இடப்பெயர்ச்சி குணகங்களின் மதிப்பு மற்றும் அடையாளம் கியரின் வடிவியல் மற்றும் தர குறிகாட்டிகளை பாதிக்கிறது. ஆஃப்செட் கியர்களின் பயன்பாடு உங்களை அனுமதிக்கிறது: ஆயுள், சுமை திறன் அல்லது கியர் ஈடுபாட்டின் மென்மையை அதிகரிக்க, பரிமாணங்களைக் குறைக்க அல்லது கொடுக்கப்பட்ட மைய தூரத்திற்கு பொருந்தும். கியர் ரயிலின் இயக்க நிலைமைகளை கணக்கில் எடுத்துக்கொண்டு இடப்பெயர்ச்சி குணகங்கள் ஒதுக்கப்பட வேண்டும்.
இடப்பெயர்ச்சி குணகங்களைத் தேர்ந்தெடுக்கும்போது வடிவமைப்பு நிலைமைகளின் தொகுப்பு தடுக்கும் வரையறைகளால் கணக்கில் எடுத்துக்கொள்ளப்படுகிறது.
தடுக்கும் விளிம்பு என்பது பற்களின் எண்ணிக்கையின் சில சேர்க்கைகளுக்கான கோடுகளின் தொகுப்பாகும் z 1 மற்றும் z 2 ஒருங்கிணைப்பு அமைப்பில் எக்ஸ் 1, மற்றும் எக்ஸ் 2 (படம் 4.6). இந்த அமைப்பில் உள்ள ஒவ்வொரு புள்ளியும் ஒரு கியருக்கு ஒத்திருக்கிறது z 1, z 2, உறுதியாக எக்ஸ் 1, மற்றும் எக்ஸ் 2. ஆஃப்செட் இல்லாத கியர் ரயில் ( எக்ஸ் 1,2 = 0) மூலப் புள்ளிகள் அமைந்துள்ள புள்ளிகளுடன் ஒத்துள்ளது நேராக ஏ-ஏ, உடன் பூஜ்ஜிய சமநிலை கியர்களுடன் ஒத்துள்ளது xΣ = 0. A-A வரிக்கு மேலே நேர்மறை பரிமாற்றங்கள் உள்ளன xΣ>0, மற்றும் கீழே - உடன் எதிர்மறை xΣ < 0. வரி A-A க்கு இணையான எந்த வரியும், அதாவது, 45 ° கோணத்தில் அச்சுகளைக் கடப்பது, இதில் உள்ள கியர்களுக்கு ஒத்திருக்கிறது. xΣமற்றும் α டபிள்யூஅப்படியே இருக்கும்.
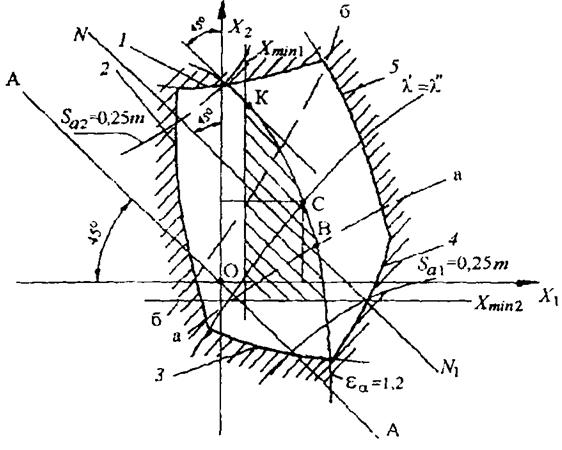
அரிசி. 4.6 தடுப்பு சுற்று
கியர் பற்களின் குறுக்கீடு அல்லது கியர் பற்கள் கூர்மைப்படுத்துதல் போன்றவற்றில் ஒன்று தோன்றுவதால், ஆயப் புலமானது கியர் ரயில் இருக்க முடியாத கோடுகளுக்கு மட்டுப்படுத்தப்பட்டுள்ளது ( சா 1 <0 или சா 2 <0), или коэффициент перекрытия становится меньше единицы, или подрез зубьев начинает захватывать активную часть профиля. Совокупность этих линий называется блокирующим контуром.
அத்திப்பழத்தில். 4.6 வரிகள் 1 , 2 சக்கரத்தின் பல் வேரில் குறுக்கீட்டின் தொடக்கத்திற்கு ஒத்திருக்கிறது z 2 மற்றும் வரிகள் 3 , 4 - சக்கரத்தின் பல் வேரில் குறுக்கீடு z 1. வரி 5 ஒன்றுடன் ஒன்று குணகத்தின் வரம்பு மதிப்புக்கு ஒத்திருக்கிறது (ε அ= 1).
நிபந்தனை எல்லைகளின் கோடுகள் மற்றும் தரமான குறிகாட்டிகளின் கோடுகள் தடுக்கும் விளிம்பில் பயன்படுத்தப்படுகின்றன. நிபந்தனை எல்லைகள் இருக்கலாம்:
அதில் வரிகள் சா 1,2 = 0,25t;
கோடு εα = 1.2;
அண்டர்கட் தோற்றத்தின் தொடக்கத்தின் கோடுகள், அதாவது. எக்ஸ் 1= எக்ஸ்நிமிடம்1 மற்றும் எக்ஸ் 2= எக்ஸ்நிமிடம்2.
தர குறிகாட்டிகளில் மூன்று வரிகள் உள்ளன:
டிரைவ் வீலுடன் பற்களின் சம வளைக்கும் வலிமையை வழங்கும் இரண்டு கோடுகள் z 1 (வரி ஆ) மற்றும் டிரைவ் வீலுடன் z 2 (வரி b-b);
சக்கரங்களின் பற்களின் கால்களில் குறிப்பிட்ட சீட்டுகளை சீரமைக்கும் ஒரு கோடு z 1 மற்றும் z 2, தொடர்பு புள்ளிகள் ஆனால்மற்றும் ATநிச்சயதார்த்த கோடுகள்.
சார்பு குணகங்களைத் தேர்ந்தெடுப்பதற்கான நுட்பம் தடுப்பு சுற்றுகள்
1. அதிக கியர் தொடர்பு வலிமையை வழங்கும் இடப்பெயர்ச்சி குணகங்களின் தேர்வு z 1, z 2.
முழு உரையைப் பெறவும்தொடர்பு வலிமையானது, தொடர்பு கொள்ளும் சுயவிவரங்களின் வளைவின் குறைக்கப்பட்ட ஆரங்களின் அதிகரிப்புடன் அதிகரிக்கிறது, இது நிச்சயதார்த்த கோணத்தின் அதிகரிப்புடன் அதிகரிக்கிறது α டபிள்யூ, எனவே, அதிகரிப்புடன் எக்ஸ்Σ. நேர்மறை மதிப்புகளின் மண்டலத்தில் நிபந்தனை விளிம்பிற்கு வரையவும் எக்ஸ் 1 மற்றும் எக்ஸ்ஆய அச்சுகளுக்கு 45° கோணத்தில் 2 தொடுகோடு. தொடு புள்ளி (புள்ளி செய்யஅத்திப்பழத்தில். 4.6) மதிப்புகளை தீர்மானிக்கவும் எக்ஸ் 1 மற்றும் எக்ஸ்கியரில் அதிகபட்ச தொடர்பு வலிமைக்கு 2 z 1, z 2.
2. பரிமாற்ற சக்கரங்களின் பற்களின் அதிகபட்ச வளைக்கும் வலிமையை வழங்கும் இடப்பெயர்ச்சி குணகங்களின் தேர்வு z 1, z 2.
அடிவாரத்தில் உள்ள பற்களின் தடிமன் அதிகரிப்பதன் மூலம் வளைக்கும் வலிமை அதிகரிக்கிறது, அதாவது அதிகரிப்புடன் எக்ஸ் 1 மற்றும் எக்ஸ் 2 ஓட்டுநர் மற்றும் இயக்கப்படும் சக்கரங்களின் பற்களை வளைப்பதில் சம வலிமைக்கு உட்பட்டது. ஓட்டும் சக்கரத்துடன் z 1, நாம் கோடு வழியாக வலதுபுறம் நகர்த்துவோம் ஆ, மற்றும் ஓட்டுநர் சக்கரத்துடன் z 2 - வரியுடன் b-bநிபந்தனை விளிம்புடன் குறுக்குவெட்டு வரை (வரி ஈ அ= 1,2). வெட்டுப்புள்ளி (புள்ளி ATமுன்னணி z 2) குணகங்களை தீர்மானிக்கவும் எக்ஸ் 1 மற்றும் எக்ஸ் 2, பரிமாற்ற சக்கரங்களின் பற்களின் அதிகபட்ச வளைக்கும் வலிமைக்கு அருகில் வழங்குகிறது z 1, z 2.
3. கியர் ரயிலின் கைப்பற்றுதல் மற்றும் சிராய்ப்பு உடைகளுக்கு மிகப்பெரிய எதிர்ப்பை வழங்கும் இடப்பெயர்ச்சி குணகங்களின் தேர்வு z 1, z 2.
சுயவிவரங்களின் நெகிழ் வேகம் குறைவதால் வலிப்பு மற்றும் உடைகள் குறைக்கப்படுகின்றன Vs, அதன் அதிகபட்ச மதிப்புகள் சிறியதாக மாறும் கா – நிச்சயதார்த்தக் கோட்டின் செயலில் உள்ள பகுதியின் நீளம், அதாவது நிச்சயதார்த்த கோணம் α அதிகரிப்புடன் டபிள்யூமற்றும் மொத்த சார்பு காரணி எக்ஸ்Σ சக்கரங்களின் பற்களின் கால்களில் குறிப்பிட்ட சீட்டுகளின் சமத்துவத்தின் கீழ் z 1, zநிச்சயதார்த்த கோட்டின் A மற்றும் B புள்ளிகளில் 2 தொடர்பு உள்ளது. λ’-λ" கோடு ஒரு நிபந்தனை விளிம்புடன் வெட்டும் வரை வலதுபுறமாக நகர்வோம். வெட்டுப்புள்ளி (புள்ளி இருந்து) குணகங்களை தீர்மானிக்கும் எக்ஸ் 1 மற்றும் எக்ஸ் 2, கியர் ரயிலின் பறிமுதல் மற்றும் சிராய்ப்புக்கு எதிர்ப்பை வழங்குகிறது z 1 ,z 2 .
4. சார்பு குணகங்களின் கணக்கீடு எக்ஸ் 1 மற்றும் எக்ஸ் 2 மைய தூரம் இல்லாத நிலையில் அச்சோபல்லின் காலின் குறைபாட்டை நீக்கும் நிபந்தனையின் படி உற்பத்தி செய்யப்படுகிறது. ரேக் ஈடுபாட்டிற்கு
http://pandia.ru/text/78/354/images/image047_7.gif" width="331" height="47 src=">
http://pandia.ru/text/78/354/images/image049_4.jpg" width="375" height="406 src=">
அரிசி. 4.7. தடுக்கும் சுற்றுz 1 = 13 மற்றும்z 2 = 20
தடுக்கும் விளிம்பின் படி அசல் விளிம்பின் இடப்பெயர்ச்சி குணகங்களை நாங்கள் தேர்ந்தெடுக்கிறோம்: எக்ஸ் 1 = 0,257; எக்ஸ் 2 = 0,743.
பிரிக்கும் ஆரங்கள்:
http://pandia.ru/text/78/354/images/image051_7.gif" width="109" height="26 src=">
http://pandia.ru/text/78/354/images/image053_5.gif" width="239" height="26 src=">
ஈடுபாட்டின் கோணம் α டபிள்யூ
http://pandia.ru/text/78/354/images/image055_5.gif" width="104" height="26 src=">
ஆரம்ப ஆரங்கள் rw:
http://pandia.ru/text/78/354/images/image057_5.gif" width="322" height="25 src=">
http://pandia.ru/text/78/354/images/image059_4.gif" width="309" height="25 src=">.
மைய தூரத்தை பிரிக்கிறது.
உணரப்பட்ட சார்பு குணகம்
http://pandia.ru/text/78/354/images/image062_2.gif" width="425" height="25 src=">.
பல் மேல் ஆரங்கள்:
http://pandia.ru/text/78/354/images/image064_0.gif" width="309" height="75 src=">
சுருதி சுற்றளவு பல் சுருதி p=t= 3.141592 4 = 12.57 மிமீ.
http://pandia.ru/text/78/354/images/image067_1.gif" width="465" height="64 src=">
செங்குத்து வட்டங்களில் பற்களின் தடிமன்:
http://pandia.ru/text/78/354/images/image069_0.gif" width="123" height="25 src=">
http://pandia.ru/text/78/354/images/image071_1.gif" width="103" height="25 src=">
http://pandia.ru/text/78/354/images/image073_1.gif" width="104" height="25 src=">
http://pandia.ru/text/78/354/images/image075_0.gif" width="464" height="25 src=">
ஒன்றுடன் ஒன்று விகிதம்
http://pandia.ru/text/78/354/images/image077.gif" width="465" height="51 src=">.
எடுத்துக்காட்டு 4.2.ஸ்பர் இன்வால்யூட் கியரை வடிவமைக்கவும் z 4, zகொடுக்கப்பட்ட மைய தூரத்துடன் 5. சக்கரங்கள் ஒரு நிலையான தொகுதி ரயில் மூலம் வெட்டப்படுகின்றன மீ= 2.5 மிமீ.
ஆரம்ப தரவு: மைய தூரம் α டபிள்யூ= 52 மிமீ; பற்சக்கர விகிதம் நான் 45 = 1.8; பல் தொகுதி மீ= 2.5 மிமீ; GOST க்கு இணங்க ஆரம்ப உருவாக்கும் சுற்றுகளின் அளவுருக்கள்: α = 20°, ஹெக்டேர்* = 1; உடன்* = 0,25.
மைய தூரத்தை இவ்வாறு குறிப்பிடலாம்
http://pandia.ru/text/78/354/images/image079_0.gif" width="111" height="52 src=">.gif" width="181" height="51 src=">
சமத்துவமின்மை அடையாளத்தின்படி, அருகிலுள்ள சிறியதை நாங்கள் ஏற்றுக்கொள்கிறோம்
z4=14..gif" width="168" height="52 src=">
மொத்த பற்களின் எண்ணிக்கையைக் கண்டறிதல் zΣ \u003d 14 + 25 \u003d 39 மற்றும் பிரிக்கும் மைய தூரத்தைக் கணக்கிடுங்கள் ![]()
உணரப்பட்ட இடப்பெயர்ச்சி குணகம் http://pandia.ru/text/78/354/images/image086_0.gif" width="316" height="52 src=">
http://pandia.ru/text/78/354/images/image088_0.gif" width="257" height="25 src=">
தொகை ஆஃப்செட் காரணி
http://pandia.ru/text/78/354/images/image090_0.gif" width="253" height="47 src=">.gif" width="255" height="52 src=">
சக்கரத்திற்கு http://pandia.ru/text/78/354/images/image094_0.gif" width="247" height="25 src=">
ஸ்பர் கியர்களின் வடிவியல் அளவுருக்களை நாங்கள் தீர்மானிக்கிறோம்.
பிரிக்கும் ஆரங்கள்:
http://pandia.ru/text/78/354/images/image096_0.gif" width="231" height="47 src=">
அடிப்படை ஆரங்கள்:
http://pandia.ru/text/78/354/images/image098_0.gif" width="324" height="25 src=">
ஈடுபாட்டின் கோணம் அடபிள்யூ= 28°14.
ஆரம்ப ஆரங்கள்
http://pandia.ru/text/78/354/images/image100_0.gif" width="323" height="52 src=">
மைய தூரம் அச்சோ = 52 மி.மீ. மைய தூரத்தை பிரிக்கிறது a = 48.75 மி.மீ.
பல் மேல் ஆரங்கள்:
http://pandia.ru/text/78/354/images/image102_0.gif" width="512" height="29 src=">
சுருதி சுற்றளவு பல் சுருதி ப =π மீ = 3.141592 2.5 = 7.85 மிமீ.
சுற்றளவு பல் தடிமன்களை பிரித்தல்:
http://pandia.ru/text/78/354/images/image104_0.gif" width="499" height="47 src=">
ஆரம்ப சுற்றளவு பல் தடிமன்:
டாப்ஸின் சுற்றளவுடன் பற்களின் தடிமன்:
http://pandia.ru/text/78/354/images/image108_0.gif" width="261" height="25 src=">
http://pandia.ru/text/78/354/images/image112_0.gif" width="651" height="57">
ஒன்றுடன் ஒன்று விகிதம்
http://pandia.ru/text/78/354/images/image114_0.gif" width="411" height="51 src=">
4.1.5 இறுதிப் பகுதியில் உள்ளிழுக்கும் ஸ்பர் கியரின் மெஷிங் வடிவத்தின் கட்டுமானம்
முழு உரையைப் பெறவும்கியர் நிச்சயதார்த்தத்தின் வரைதல் அதன் வடிவியல் கணக்கீட்டிற்கு முன்னதாக இருக்க வேண்டும், சூத்திரங்களின்படி ஒரு ஸ்பர் கியருக்கு செய்யப்படுகிறது.
பின்வரும் வரிசையில் இணைப்பை உருவாக்குவது வசதியானது :
1. மைய தூரத்தை ஒதுக்கி வைக்கவும் அச்சோ.
2. வட்டங்களை வரையவும்: ஆரம்ப, பிரித்தல், முக்கிய, பற்கள் மற்றும் தொட்டிகளின் மேல். கட்டுமானக் கட்டுப்பாட்டைச் செய்யுங்கள்: ரேடியல் அனுமதிகள் 0.25 க்கு சமமாக இருக்க வேண்டும் மீ, பிரிக்கும் வட்டங்களுக்கு இடையே உள்ள தூரம் - ut.
3. முக்கிய வட்டங்களைப் பற்றி, நிச்சயதார்த்தத்தின் ஒரு கோட்டை வரையவும். கட்டுமானத்தை சரிபார்க்கவும்: நிச்சயதார்த்த கோடு நிச்சயதார்த்த துருவத்தின் வழியாக செல்ல வேண்டும் - ஆரம்ப வட்டங்களின் தொடர்பு புள்ளி, மற்றும் கட்டுமானத்தின் நிச்சயதார்த்த கோணம் கணக்கிடப்பட்ட α உடன் ஒத்துப்போக வேண்டும். டபிள்யூ (α tw).
4. நிச்சயதார்த்தக் கோட்டின் எல்லைகளைக் குறிக்கவும் எம்நில எம் 2 - முக்கிய வட்டங்களுடனான நிச்சயதார்த்தக் கோட்டின் தொடர்பு புள்ளிகள், மற்றும் செயலில் உள்ள நிச்சயதார்த்தக் கோட்டின் எல்லைகள் - பற்களின் மேல் வட்டங்களுடன் நிச்சயதார்த்தக் கோட்டின் குறுக்குவெட்டு புள்ளிகள் (புள்ளிகள் ஆனால்மற்றும் AT).
5. நிச்சயதார்த்த துருவத்தின் வழியாகச் செல்லும் பல் சுயவிவரங்களை உருவாக்கவும் பின்வரும் வழியில்: நிச்சயதார்த்த துருவத்திலிருந்து t. P (படம் 4.8) ஆரம்ப வட்டங்களில் பற்களின் தடிமன் இடுகிறது SW 1.2. பற்களின் தடிமன்களின் நடுப்புள்ளிகள் வழியாக, பற்களின் சமச்சீர் கோடுகள் வரையப்படுகின்றன. சமச்சீர் கோட்டின் புள்ளிகளிலிருந்து, பற்களின் பாதி தடிமன் பல்வேறு வட்டங்களில் போடப்படுகிறது: அடித்தளம், பிரிக்கும் ஒன்று, பற்களின் மேல் மற்றும் தன்னிச்சையானது. இதன் விளைவாக புள்ளிகள் ஒரு மென்மையான வளைவு மூலம் இணைக்கப்பட்டுள்ளன.
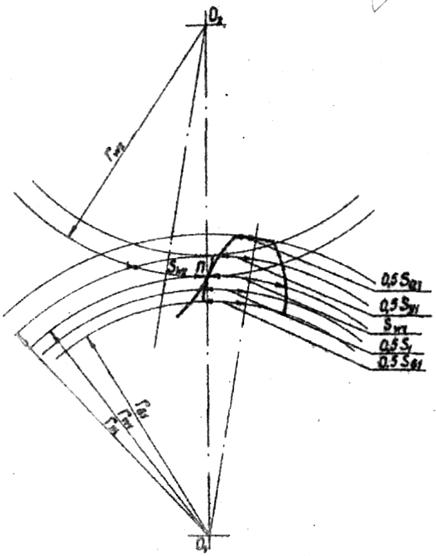
அரிசி. 4.8 உள்ளடக்கிய பல் சுயவிவரங்களின் கட்டுமானம்
6. வெவ்வேறு பல் சுயவிவரங்களை உருவாக்கவும். இதற்கு, பற்களின் சமச்சீர் அச்சுகள் காணப்படுகின்றன. வெவ்வேறு சுயவிவரங்களின் புள்ளிகள் முன்பு கட்டப்பட்ட சுயவிவரங்களின் புள்ளிகளுக்கு சமச்சீராக அமைந்துள்ளன (படம் 4.9, அ).
7. இன்வால்யூட் சுயவிவரத்தை தொட்டிகளின் வட்டங்களுடன் இணைக்கும் ஒரு மாறுதல் வளைவை உருவாக்கவும். வெட்டு சக்கரத்துடன் தொடர்புடைய அதன் இயக்கத்தில் உற்பத்தி செய்யும் ரயிலின் சுயவிவரத்தின் வட்டமான பகுதியால் விவரிக்கப்பட்ட வட்டங்களின் குடும்பத்தின் உறை போல, பற்களை வெட்டும் செயல்பாட்டில் மாறுதல் வளைவு தானாகவே உருவாகிறது. மாறுதல் வளைவை எளிமையான முறையில் கட்டமைக்க முடியும். ஒரு என்றால்
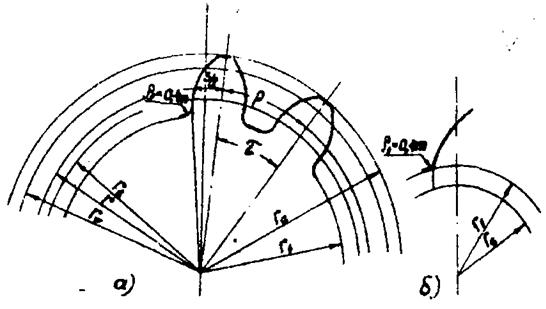
rf < ஆர்பி, பின்னர் ஒரு மாறுதல் வளைவைப் பெற, ஒரு ரேடியல் நேர்கோடு உள்வாங்கலின் ஆரம்ப புள்ளியின் வழியாக வரையப்படுகிறது, பின்னர் ρ ஆரம் கொண்ட ஒரு வட்ட வில் f=0,4மீ, ரேடியல் நேர்கோடு மற்றும் தாழ்வு வட்டத்துடன் இணைந்தது (படம் 4.9, அ) ஒரு என்றால்
rf > ஆர்பி, பின்னர் மாறுதல் வளைவு ஆரம் ρ வட்டத்தின் ஒரு வில் மூலம் கோடிட்டுக் காட்டப்படுகிறது f = 0,4மீ, தொட்டிகளின் உள்ளிழுக்கும் மற்றும் சுற்றளவுக்கு இணை.
அரிசி. 4.9 ஒரு சுழல் வளைவை உருவாக்குதல்
4.1.6. வடிவமைப்பு வரிசை
1. ஆரம்ப தரவு மற்றும் பரிமாற்றத்தின் செயல்பாட்டிற்கான நிபந்தனைகளுடன் உங்களை நன்கு அறிந்திருங்கள்.
2. அசல் உருவாக்கும் சுற்றுகளின் அளவுருக்களுடன் உங்களைப் பழக்கப்படுத்துங்கள்.
3. கொடுக்கப்பட்ட மைய தூரத்தில் அடபிள்யூதேவையான சார்பு காரணிகளைக் கணக்கிடுங்கள் எக்ஸ் 1 மற்றும் எக்ஸ் 2 (எடுத்துக்காட்டு 2, ப. 1.3 ஐப் பார்க்கவும்), மற்றும் மைய தூரத்தின் இலவச தேர்வுடன், ஆஃப்செட் குணகங்களை ஒதுக்கவும், டிரான்ஸ்மிஷனின் இயக்க நிலைமைகளை கணக்கில் எடுத்துக்கொண்டு, தடுக்கும் சுற்றுகளைப் பயன்படுத்தவும்.
5. சக்கரங்களின் கியரிங் வரையவும் z 1 மற்றும் z 2, இது முக்கிய பரிமாணங்களைக் காட்டுகிறது.
4.2 செயற்கைக்கோள் வழிமுறைகளின் தொகுப்பு
சில கியர்களின் அசையும் அச்சுகள் கொண்ட கியர் வழிமுறைகள் என்று அழைக்கப்படுகின்றன செயற்கைக்கோள். ஒரு செயற்கைக்கோள் பரிமாற்றம், இதில் மத்திய சக்கரங்களில் ஒன்றை சரிசெய்வதன் மூலம் தனிப்பட்ட இணைப்புகளில் கூடுதல் இயக்கவியல் இணைப்பு விதிக்கப்படுகிறது. கிரகம், மற்றும் கூடுதல் இணைப்பு இல்லாமல் - வித்தியாசமான. இந்த இணைப்பு அதன் இரண்டு இணைப்புகளை ஒரு மூடும் சுற்றுடன் இணைப்பதன் மூலம் மேற்கொள்ளப்படலாம், இதன் விளைவாக ஒரு மூடிய வேறுபட்ட பரிமாற்றம் உருவாகிறது.
செயற்கைக்கோள் வழிமுறைகள் சிறிய எண்ணிக்கையிலான சக்கரங்கள், லேசான தன்மை மற்றும் வடிவமைப்பின் கச்சிதத்துடன், பெரிய கியர் விகிதங்களை இனப்பெருக்கம் செய்வதை சாத்தியமாக்குகின்றன. எனவே, அவை இயந்திர பொறியியல் மற்றும் கருவி தயாரிப்பில் பரவலாகப் பயன்படுத்தப்படுகின்றன. கியர் விகிதங்களைச் செயல்படுத்த கிரக வழிமுறைகள் மற்றும் மூடிய வேறுபாடுகள் பயன்படுத்தப்படுகின்றன, மேலும் கோண வேகங்களைச் சேர்க்க அல்லது பொறிமுறையின் இரண்டு வெளியீட்டு இணைப்புகளின் சுயாதீன சுழற்சி இயக்கத்தை விரிவுபடுத்துவதற்கு வேறுபாடுகள் பயன்படுத்தப்படுகின்றன.
செயற்கைக்கோள் பொறிமுறைகளின் கியர் விகிதங்களைத் தீர்மானிக்க பல முறைகள் உள்ளன: பகுப்பாய்வு, இயக்கம் தலைகீழ் கொள்கையின் அடிப்படையில், மற்றும் வரைகலை, வேக முக்கோணங்களின் கட்டுமானத்தைப் பயன்படுத்தி.
4.2.1. கிராஃப்-பகுப்பாய்வு முறை தீர்மானித்தல்
கியர் விகிதம் (வழி)
வேக முக்கோணங்களைப் பயன்படுத்தி கியர் விகிதத்தை நிர்ணயிப்பதற்கான முறையின் சாராம்சம், உடல் ஒரு நிலையான அச்சில் சுழலும் போது நேரியல் வேகம் சுழற்சியின் ஆரத்திற்கு நேரடியாக விகிதாசாரமாக இருக்கும் என்ற உண்மையை அடிப்படையாகக் கொண்டது ( வி = ω ஆர்), மற்றும், இதன் விளைவாக, எந்த ஆரத்திலும் இருக்கும் புள்ளிகளின் நேரியல் திசைவேகங்கள் ஒரு நேர் கோட்டின் விதியின்படி மாறுகின்றன (படம் 4.10).
அத்திப்பழத்தில். 4.11 புள்ளியில் தொடும் சக்கரங்களின் ஆரம்ப வட்டங்களைக் காட்டுகிறது ஆனால், நேரியல் வேகம் VAஇது ஒரு திசையன் மூலம் குறிக்கப்படுகிறது.
சக்கரத்திற்கு 1
விட்டத்தில் அமைந்துள்ள புள்ளிகளின் வேகத்தில் மாற்றம் http://pandia.ru/text/78/354/images/image122_0.gif" width="69" height="52 src=">, பிரிவு OA –
(படம் 4.10), பின்னர்  எங்கே μ வி- வேக அளவு; μ எல்- நீள அளவு. இருந்து, நாம் பெறுகிறோம்
எங்கே μ வி- வேக அளவு; μ எல்- நீள அளவு. இருந்து, நாம் பெறுகிறோம்  . நேர்கோட்டில் உள்ள புள்ளிகளின் நேரியல் வேகத்தின் திசையன்கள் OAµ அளவில் விசாய்வாக வரையறுக்கப்பட்டுள்ளது ஓ, கோட்டுடன் கோணத்தை β ஆக்குகிறது OAமற்றும் பிரிவில் இந்த வேகங்களின் விநியோகத்தை வகைப்படுத்துகிறது OA.
. நேர்கோட்டில் உள்ள புள்ளிகளின் நேரியல் வேகத்தின் திசையன்கள் OAµ அளவில் விசாய்வாக வரையறுக்கப்பட்டுள்ளது ஓ, கோட்டுடன் கோணத்தை β ஆக்குகிறது OAமற்றும் பிரிவில் இந்த வேகங்களின் விநியோகத்தை வகைப்படுத்துகிறது OA.
எனவே, கோணத் திசைவேகமும் சுழற்சிகளின் எண்ணிக்கையும் புள்ளியில் உள்ள முனையுடன் கூடிய கோணத்தின் தொடுகோடு விகிதாசாரமாகும். ஓ. இதன் விளைவாக சார்பு, இணைப்புகளின் சுழற்சி இயக்கம் கொண்ட வழிமுறைகளின் கியர் விகிதத்தை தீர்மானிக்க வரைகலை கட்டுமானங்களுக்கு செல்ல உங்களை அனுமதிக்கிறது.
ஆய்வகம் #17
உள்ளடக்கிய கியர் கூறுகளை அங்கீகரித்தல்
வேலையின் நோக்கம்ஈடுபடுத்தப்பட்ட கியரின் கூறுகளை அங்கீகரிக்கும் முறையை மாணவர்களுக்கு அறிமுகப்படுத்துவதாகும்.
பல்வேறு வழிமுறைகளை சரிசெய்யும் போது, இந்த கியர்களை உருவாக்கும் கியர்களின் அளவீடுகளின் முடிவுகளின் அடிப்படையில் கியர்களின் முக்கிய அளவுருக்களை அடிக்கடி தீர்மானிக்க வேண்டும். அதே நேரத்தில், ஒரு கியர் ஜோடியின் அளவுருக்களை துல்லியமாக அங்கீகரிப்பது கடினம், சில சமயங்களில் முற்றிலும் சாத்தியமற்றது என்று அடிக்கடி நிகழ்கிறது. இதற்குக் காரணம் பற்கள் தேய்மானம் அல்லது சேதம், பற்களின் அசல் வடிவத்தை இழக்க வழிவகுக்கிறது. இதுபோன்ற சந்தர்ப்பங்களில், அவர்கள் அங்கீகாரத்தை மறுத்து, மைய தூரம் மற்றும் சக்கரங்களின் பற்களின் எண்ணிக்கைக்கு ஏற்ப கியர் ஜோடியை மறுவடிவமைப்பு செய்வதை நாடுகிறார்கள்.
அங்கீகரிக்கப்பட வேண்டிய முக்கிய அளவுருக்கள்: பற்களின் தொகுதி, அசல் விளிம்பின் சுயவிவரக் கோணம், கருவி இடப்பெயர்ச்சி குணகங்கள், பற்களின் உயர விகிதங்கள். இந்த அளவுருக்களை அறிந்து, பொருத்தமான கணக்கிடப்பட்ட சார்புகளைப் பயன்படுத்தி, கியர்கள் மற்றும் கியர்களின் பரிமாணங்களை (சுற்றளவு படிகள், வட்டத்தின் விட்டம், பல் தடிமன் போன்றவை) தீர்மானிக்க முடியும்.
A. பல் மாடுலஸ் மற்றும் அசல் விளிம்பின் சுயவிவரக் கோணத்தை தீர்மானித்தல்
உள்ளடக்கிய பல் சுயவிவரத்தைக் கொண்ட ஒரு சக்கரத்திற்கு, அளவிடப்பட்ட பிரதான சுற்றளவு சுருதியிலிருந்து ஆரம்ப விளிம்பின் மாடுலஸ் மற்றும் சுயவிவரக் கோணத்தை தீர்மானிக்க அறிவுறுத்தப்படுகிறது. இவ்வாறு, பத்தி A இல் முன்வைக்கப்பட்ட சிக்கலின் தீர்வு சக்கரத்தின் முக்கிய சுற்றளவுடன் சுற்றளவு சுருதியைக் கண்டறிவதற்கு குறைக்கப்படுகிறது.
மிகவும் எளிமையான மற்றும் வசதியான வழிபிரதான சுற்றளவு சுருதியின் அளவீடு உள்வாங்கலின் சொத்தை அடிப்படையாகக் கொண்டது, இதன்படி ஒரே பெயரில் உள்ள இரண்டு அருகிலுள்ள உள்வட்டங்களுக்கு இடையே உள்ள இயல்பான தூரம் நிலையானது மற்றும் முக்கிய சுற்றளவு சுருதிக்கு சமம்.
முக்கிய சுற்றளவு சுருதி, சாதாரணமாக அளவிடப்படுகிறது, ஒரு கருவி ஆஃப்செட் (சரிசெய்யப்பட்டது) மற்றும் பூஜ்ஜிய ரேக் அமைப்பில் (ஆஃப்செட் இல்லாமல்) வெட்டப்பட்ட கியர் மற்றும் சீரான கியர் ஆகிய இரண்டிற்கும் ஒரே மதிப்பைக் கொண்டுள்ளது. பற்களால் செயல்பாட்டின் போது அணியப்படுகிறது (அதே அடிப்படை அளவுருக்கள் கொண்ட கியர்கள் என்று பொருள்). எனவே, முக்கிய படி மூலம் பற்களின் தொகுதி மற்றும் சுயவிவரத்தின் கோணத்தை நிர்ணயிக்கும் முறை மிகவும் நம்பகமான முடிவுகளை அளிக்கிறது.
முக்கிய படியின் அளவீடு ஒரு பெடோமீட்டர், சாதாரண மீட்டர் அல்லது வெர்னியர் காலிபர் மூலம் 0.02 அல்லது 0.05 மிமீ பிரிவின் மதிப்புடன் மேற்கொள்ளப்படுகிறது.
ஒரு காலிபர் (சாதாரண கேஜ்) மூலம் அளவிடும் போது முக்கிய படியானது பொதுவான இயல்பான நீளத்தின் இரண்டு அளவீடுகளிலிருந்து வித்தியாசமாக தீர்மானிக்கப்படுகிறது (படம் 1).
அரிசி. 18. பொதுவான இயல்பை அளவிடுதல்
எங்கே - பற்களின் சுற்றளவு போது பொதுவான சாதாரண நீளம்;
சுற்றளவில் பொதுவான இயல்பான நீளம் ( n -1) பற்கள்.
ஒரு வரியை அளவிடும் போதுஎண் n காலிபரால் பிடிக்கப்பட்ட பற்கள் தேர்ந்தெடுக்கப்படுகின்றன, இதனால் காலிபரின் தாடைகள் பற்களின் பக்க மேற்பரப்புகளை அவற்றின் நடுப்பகுதியில் (உயரம் வரை) தோராயமாகத் தொடும். காலிபரின் இந்த அமைப்பு வெட்டு நீளத்தில் பல் தேய்மானத்தின் விளைவைக் குறைக்கிறது.மற்றும் இந்த பிரிவு முக்கிய வட்டத்தைத் தொடுவதை உறுதி செய்கிறது, இது அளவிடுவதற்கு அவசியமான நிபந்தனையாகும்மற்றும் . இந்த வழக்கில், காலிபரின் தாடைகள் பின்புறத்திற்கு எதிராக ஓய்வெடுக்கக்கூடாது பக்க மேற்பரப்புகள்அருகில் உள்ள பற்கள். அளவீட்டின் போது காலிபரின் விமானம் சக்கரத்தின் சுழற்சியின் அச்சுக்கு செங்குத்தாக உள்ளது.
அளவீட்டு துல்லியத்தை மேம்படுத்த, ஒவ்வொரு அளவுகளும் -மற்றும் - மூன்று முறை அளவிடப்படுகிறது (சக்கரத்தில் வெவ்வேறு இடங்களில்). (1) தொடர்பாக, இந்த அளவுகளின் எண்கணித சராசரி மதிப்புகள் மாற்றப்படுகின்றன:
![]()
தொடர்பு (1) மூலம் கணக்கிடப்பட்ட அளவிடப்பட்ட சக்கரத்தின் முக்கிய சுருதி முக்கிய சுற்றளவு சுருதிகளின் அட்டவணை 1 இன் படி குறிப்பிடப்பட்டுள்ளது: முக்கிய சுருதி அட்டவணையில் காணப்படுகிறது, இது தொடர்பு (1) மூலம் +0.05 மிமீக்கு மிகாமல் கண்டறியப்பட்டதிலிருந்து வேறுபடுகிறது. அட்டவணை முக்கிய படியின் மதிப்பு சுத்திகரிக்கப்பட்டதாக எடுக்கப்படுகிறது.
அதே அட்டவணை 1 இல் உள்ள சுத்திகரிக்கப்பட்ட பிரதான சுற்றளவு சுருதியின் படி பல் தொகுதி ஆகும்மீ (அல்லது சுருதி) மற்றும் சுயவிவர கோணம் . பல் தொகுதி மதிப்புகள் தரப்படுத்தப்பட்டுள்ளன (GOST 9563-60).
பிரதான சுற்றளவு சுருதியின் அட்டவணை 1 இன் படி தெளிவுபடுத்தும் போது, நீங்கள் முதலில் (மறைமுக தரவுகளின்படி) எந்த அளவீடுகளில் - மெட்ரிக் அல்லது அங்குலம் - சக்கரம் செய்யப்பட்டது என்பதைக் கண்டுபிடிக்க முயற்சிக்க வேண்டும். அங்குல நாடுகளில், பல் தொகுதிக்குப் பதிலாக விட்டம் கொண்ட சுருதி பயன்படுத்தப்படுகிறது.
தொகுதி மற்றும் சுருதி சார்பு மூலம் தொடர்புடையது:
குறிப்பு. அட்டவணை 2 (இணைப்பு) மெட்ரிக் மற்றும் அங்குல அளவீட்டு முறைகளைக் கொண்ட நாடுகளைக் காட்டுகிறது, அதன்படி, மாடுலர் மற்றும் பிட்ச் கியரிங் அமைப்புகளைக் கொண்டுள்ளது. மேசைமற்றும் - பல் தலையின் உயரத்தின் குணகங்கள் மற்றும் நிச்சயதார்த்தத்தில் ரேடியல் அனுமதி.
B. டூல் ஆஃப்செட் காரணியை தீர்மானித்தல்
எக்ஸ் காரணி அறியப்பட்ட உறவின் மூலம் இடப்பெயர்ச்சி கணக்கிடப்படுகிறது:
![]()
இங்கே: - பூஜ்ஜிய (சரி செய்யப்படவில்லை) சக்கரத்தின் முக்கிய சுற்றளவுடன் பல்லின் தடிமன்; சூத்திரத்தால் கணக்கிடப்படுகிறது:
எங்கே - பிரதான வட்டத்தின் விட்டம், d= mz- வட்டத்தின் விட்டம் பிரிக்கும்,- சுருதி வட்டத்தில் பல்லின் தடிமன்,.
பல் மாடுலஸ் மதிப்புகள்மீ மற்றும் சுயவிவர கோணம் பத்தியில் காணப்படும் ஆனால்; சுயவிவரக் கோணங்களின் உள்ளடக்கங்களின் மதிப்புகள் அட்டவணை 3 (இணைப்பு) இல் கொடுக்கப்பட்டுள்ளன.
அளவிடப்பட்ட சக்கரத்தின் முக்கிய சுற்றளவுடன் பல் தடிமன்; அளவிடப்பட்ட பொதுவான இயல்பான மற்றும் அடிப்படை சுற்றளவு சுருதியிலிருந்து தீர்மானிக்கப்படுகிறது:
எக்ஸ் கணக்கிடும் போது உறவின் படி (3), மூன்று வழக்குகள் சாத்தியமாகும்:
X=0 என்றால் - சக்கரம் பூஜ்ஜிய கருவி அமைப்பில் வெட்டப்படுகிறது (பூஜ்யம்);
X >0 என்றால் - சக்கரம் நேர்மறை கருவி அமைப்புடன் வெட்டப்படுகிறது (நேர்மறை);
எக்ஸ்<0, если - சக்கரம் எதிர்மறை கருவி அமைப்பில் வெட்டப்படுகிறது (எதிர்மறை).
எக்ஸ் காரணி கருவியின் இடப்பெயர்ச்சி, அதன் மதிப்பு சக்கரம் மற்றும் கியரின் வடிவியல் கணக்கீட்டில் பயன்படுத்தப்படுகிறது, நாம் கணக்கிடப்பட்ட ஒன்றை அழைப்போம்.
எக்ஸ் காரணி இடப்பெயர்ச்சி, இதன் மதிப்பு உறவின் மூலம் கண்டறியப்படுகிறது (3), மதிப்பின் மூலம் கணக்கிடப்பட்ட ஒன்றிலிருந்து வேறுபடுகிறது, பரிமாற்றத்தின் செயல்பாட்டிற்குத் தேவையான அடிப்படை அனுமதியைப் பெறுவதற்காக சிறப்பாக அறிமுகப்படுத்தப்பட்டதுபற்களுக்கு இடையில். பெரும்பாலும், பரிமாற்ற சக்கரங்களில் ஒன்றின் பற்களை மெல்லியதாக மாற்றுவதன் மூலம் பின்னடைவு வழங்கப்படுகிறது.
திருத்தம் கூடுதலாக தீர்மானிக்கப்பட்டது. அதன் மதிப்பு சக்கரம் மற்றும் கியரின் துல்லியத்தின் அளவு மற்றும் பற்களுக்கு இடையில் உள்ள பக்கவாட்டு அனுமதியின் தரநிலைகளின்படி இணைக்கும் வகையைப் பொறுத்தது.
குறிப்பு. உற்பத்தி நிலைகளில், பல் மாடுலஸ் பெரும்பாலும் சூத்திரத்தால் தீர்மானிக்கப்படுகிறது
![]()
எங்கே - வீல் லக் சுற்றளவு விட்டம் (அளக்கப்பட்டது), z - பற்களின் எண்ணிக்கை (எண்ணப்பட்டது).
இந்த வழக்கில், சக்கர கணிப்புகளின் மேற்பரப்பின் விட்டம் ஒரு சகிப்புத்தன்மை குறிப்பிடப்பட்டுள்ளது என்பதை நினைவில் கொள்ள வேண்டும். கூடுதலாக, ஒற்றைப்படைக்கு z சுட்டிக்காட்டப்பட்ட விட்டத்தை நேரடியாக அளவிடுவது கடினம். எனவே, சூத்திரம் (6) மூலம் கணக்கிடப்பட்ட பல் தொகுதியின் மதிப்பு தெளிவுபடுத்தப்பட வேண்டும்.
அளவிடப்பட்ட சக்கரம் நேர்மறை அல்லது எதிர்மறை கருவி அமைப்பில் வெட்டப்பட்டால், பல் தொகுதியை தீர்மானிக்க சூத்திரம் (6) பொதுவாக பொருந்தாது என்பதையும் நினைவில் கொள்ள வேண்டும்.
ஃபார்முலா (6) மூலம் கணக்கிடப்படும் பல் தொகுதி எந்த சந்தர்ப்பத்திலும் (அட்டவணையுடன் ஒப்பிடுவதன் மூலம்) அளவிடப்படும் சக்கரம் பூஜ்ஜியமா, நேர்மறை அல்லது எதிர்மறையா என்பதை தீர்மானிக்க பயன்படுத்தப்படலாம்.
ஆய்வகப் பணிகளைச் செய்யும்போது, முக்கோணவியல் அளவுகள் மற்றும் எண்களின் மதிப்புகள் ஐந்து குறிப்பிடத்தக்க இலக்கங்களுடன் எடுக்கப்படுகின்றன; பொதுவான இயல்பான பிரிவுகளின் நீளங்களின் மதிப்புகள் - ஒரு மிமீ நூறில் ஒரு பங்கு வரை துல்லியமானது; கணக்கீட்டு முடிவுகளின் ரவுண்டிங் - தோராயமான கணக்கீடுகளின் விதிகளின்படி.
உபகரணங்கள் மற்றும் கருவிகள்
1. இன்வால்யூட் டூத் சுயவிவரத்துடன் கூடிய ஸ்பர் கியர்.
2. 0.02 அல்லது 0.05 மிமீ பிரிவு மதிப்பு கொண்ட காலிபர் (சாதாரண கேஜ்).
பணி ஆணை
1. பற்களின் எண்ணிக்கையை எண்ணுங்கள் z சக்கரங்கள்.
2. எண்ணைத் தேர்ந்தெடுக்கவும் n ஒரு காலிபர் கொண்ட பற்களின் சுற்றளவு.
3. ஒரு காலிபர் மூலம் வெட்டுக்களை அளவிடவும்மற்றும் பொதுவான இயல்பானது, ஒவ்வொரு மூன்று முறையும், மற்றும் வெளிப்பாடுகள் மூலம் கண்டறியவும் (2) அவற்றின் சராசரி மதிப்புகள்.
4. உறவின் மூலம் (1), முக்கிய சுற்றளவு படியின் மதிப்பை தீர்மானிக்கவும்மற்றும் அட்டவணை 1 இன் படி அதை செம்மைப்படுத்தவும்.
5. அட்டவணை 1 இன் படி, சுத்திகரிக்கப்பட்ட பிரதான சுற்றளவு சுருதியின் படி, பல் தொகுதியைக் கண்டறியவும்மீ (அல்லது சுருதி) மற்றும் சுயவிவர கோணம்.
6. சூத்திரத்தின் படி (4), பத்தி 5 இல் காணப்படும் அளவுருக்களைப் பயன்படுத்துதல்மீ மற்றும் , பல்லின் தடிமன் கணக்கிடபூஜ்ஜிய சக்கரத்தின் முக்கிய சுற்றளவுடன்.
7. விகிதம் (5) படி, பல்லின் தடிமன் தீர்மானிக்கவும்சக்கரத்தின் அடிப்படை சுற்றளவு அளவிடப்படுகிறது.
8. உறவைப் பயன்படுத்தி (3), குணகத்தின் மதிப்பைக் கணக்கிடுங்கள்எக்ஸ் கருவி ஆஃப்செட்.
9. இணைக்கப்பட்ட படிவத்தில் ஒரு அறிக்கையை உருவாக்கவும்.
பின் இணைப்பு
அட்டவணை 1. முக்கிய சுற்று படிகள்
|
தொகுதி மீ, மிமீ |
சுருதி, அங்குலம் |
அடிப்படை படி மதிப்புகள், மிமீ |
||
|
1,25 |
3,690 |
3,793 |
||
|
3,749 |
3,863 |
|||
|
4,166 |
4,292 |
|||
|
1,50 |
4,428 |
4,552 |
||
|
4,687 |
4,823 |
|||
|
1,75 |
5,166 |
5,310 |
||
|
5,356 |
5,518 |
|||
|
2,00 |
5,904 |
6,059 |
||
|
6,249 |
6,438 |
|||
|
2,25 |
6,642 |
6,828 |
||
|
6,817 |
7,028 |
|||
|
7,380 |
7,586 |
|||
|
தொகுதி மீ, மிமீ |
சுருதி, அங்குலம் |
|||
|
2,75 |
8,118 |
8,345 |
||
|
8,332 |
8,584 |
|||
|
3,00 |
8,856 |
9,104 |
||
|
9,373 |
9,657 |
|||
|
10,332 |
10,621 |
|||
|
10,712 |
11,036 |
|||
|
4,00 |
11,808 |
12,138 |
||
|
12,497 |
12,876 |
|||
|
4,50 |
13,285 |
13,655 |
||
|
5,00 |
14,761 |
15,173 |
||
|
14,997 |
15,451 |
|||
|
5,50 |
16,237 |
16,690 |
||
|
16,663 |
17,168 |
|||
|
6,00 |
17,718 |
18,207 |
||
|
18,746 |
19,314 |
|||
|
19,189 |
19,725 |
|||
|
7,00 |
20,665 |
21,242 |
||
|
21,424 |
22,073 |
|||
|
8,00 |
23,617 |
24,276 |
||
|
24,995 |
25,752 |
|||
|
9,00 |
26,569 |
27,311 |
||
|
10,00 |
29,521 |
30,345 |
||
|
29,994 |
30,902 |
33,379 |
||
|
11,00 |
32,473 |
33,379 |
||
|
2,25 |
33,326 |
34,335 |
||
|
12,00 |
35,426 |
36,415 |
||
|
37,492 |
33,627 |
அட்டவணை 2. சுயவிவரக் கோணங்களின் முக்கோணவியல் செயல்பாடுகளை உள்ளடக்கியது
|
14030 |
 சமீபத்திய கட்டுரைகள்
|




