ABC 별표가 표시된 모든 필드입니다. 로봇 수행자를 위한 선형 알고리즘
선형 알고리즘 옵션 1 1. 로봇이 필드 중앙 어딘가에 있다고 가정하고 3x4 직사각형을 그리는 프로그램을 만듭니다. 2. 가능한 모든 방법을 사용하여 로봇을 초기 위치(◊)에서 A 지점까지 최소한의 단계로 이동해야 합니다. 3. 미로를 통해 초기 위치(◊)에서 A 지점까지 로봇을 이동해야 합니다. 옵션 2 1. 로봇이 필드 중앙 어딘가에 있다고 가정하고 4x2 직사각형을 그리는 프로그램을 만듭니다. 2. 가능한 모든 방법을 사용하여 로봇을 초기 위치(◊)에서 A 지점까지 최소한의 단계로 이동해야 합니다. 3. 미로를 통해 초기 위치(◊)에서 A 지점까지 로봇을 이동해야 합니다. 옵션 3 1. 로봇이 중앙 어딘가에 있다고 가정하고 3x3 정사각형의 둘레를 그리는 프로그램을 만듭니다. 필드. 2. 가능한 모든 방법을 사용하여 로봇을 초기 위치(◊)에서 A 지점까지 최소한의 단계로 이동해야 합니다.
3. 로봇을 미로를 통해 초기 위치(◊)에서 A 지점까지 이동해야 합니다. 1. 로봇이 필드 중앙 어딘가에 있다고 가정하고 3x3 정사각형을 그리는 프로그램을 만듭니다. 옵션 4 2. 가능한 모든 방법을 사용하여 로봇을 초기 위치(◊)에서 A 지점까지 최소한의 단계로 이동해야 합니다. 3. 미로를 통해 초기 위치(◊)에서 A 지점까지 로봇을 이동해야 합니다. 옵션 5 1. 세로 3개와 가로 2개의 셀로 구성된 문자 "G"를 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 필드 중앙 어딘가에 있습니다. 2. 가능한 모든 방법을 사용하여 로봇을 초기 위치(◊)에서 A 지점까지 최소한의 단계로 이동해야 합니다. 3. 미로를 통해 초기 위치(◊)에서 A지점까지 로봇을 이동시켜야 합니다. 옵션 6 1. 수직으로 3개의 셀, 수평으로 2개의 셀을 측정하여 문자 "P"를 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 필드 중앙 어딘가에 있습니다.
2. 가능한 모든 방법을 사용하여 로봇을 초기 위치(◊)에서 A 지점까지 최소한의 단계로 이동해야 합니다. 3. 로봇을 미로를 통해 초기 위치(◊)에서 A지점까지 이동시켜야 합니다. 1. 세로로 4개의 셀, 가로로 3개의 셀을 측정하여 문자 "T"를 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 필드 중앙 어딘가에 있습니다. 옵션 7 2. 가능한 모든 방법을 사용하여 최소 단계 수로 로봇을 초기 위치(◊)에서 A 지점으로 이동해야 합니다. 3. 로봇을 미로를 통해 초기 위치(◊)에서 A 지점까지 이동해야 합니다. 옵션 8 1. 별표로 표시된 셀을 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 필드 중앙 어딘가에 있습니다. 2. 로봇을 초기 위치(◊)에서 A 지점으로 이동하면서 별표로 표시된 필드의 모든 셀을 칠해야 합니다. 3. 로봇을 미로를 통해 초기 위치(◊)에서 A 지점까지 이동해야 합니다. 옵션 9
1. 별표가 표시된 셀을 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 필드 중앙 어딘가에 있습니다. 2. 로봇을 초기 위치(◊)에서 A 지점으로 이동하면서 별표로 표시된 필드의 모든 셀을 칠해야 합니다. 3. 로봇을 미로를 통해 초기 위치(◊)에서 A 지점까지 이동해야 합니다. 옵션 10 1. 별표로 표시된 셀을 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 필드 중앙 어딘가에 있습니다. 2. 로봇을 초기 위치(◊)에서 A 지점으로 이동하면서 별표로 표시된 필드의 모든 셀을 칠해야 합니다. 3. 미로를 통과하여 초기 위치(◊)에서 A지점까지 로봇을 이동시켜야 합니다.
순환 알고리즘. N번 순환 옵션 1 1. 처음에 로봇이 필드의 왼쪽 가장자리에 있다고 가정하고 로봇 오른쪽에 6개의 셀을 그리는 프로그램을 만듭니다. 2. 미로를 통해 초기 위치(◊)에서 A 지점까지 로봇을 안내해야 합니다. 3. 별표로 표시된 필드의 셀을 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 필드 중앙 어딘가에 있습니다. 옵션 2 1. 로봇이 처음에 필드의 오른쪽 가장자리에 있었다고 가정하고 로봇 왼쪽에 5개의 셀을 그리는 프로그램을 만듭니다. 2. 미로를 통해 초기 위치(◊)에서 A 지점까지 로봇을 안내해야 합니다. 3. 별표로 표시된 필드의 셀을 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 필드 중앙 어딘가에 있습니다. 옵션 3
1. 처음에 로봇이 필드의 왼쪽 상단에 있다고 가정하고 로봇에서 오른쪽 아래로 대각선으로 5개의 셀을 그리는 프로그램을 만듭니다. 2. 미로를 통해 초기 위치(◊)에서 A 지점까지 로봇을 안내해야 합니다. 3. 별표로 표시된 필드의 셀을 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 필드 중앙 어딘가에 있습니다. 1. 처음에 로봇이 필드의 왼쪽 하단에 있다고 가정하고 로봇에서 오른쪽 대각선으로 7개의 셀을 그리는 프로그램을 만듭니다. 옵션 4 2. 미로를 통해 초기 위치(◊)에서 A 지점까지 로봇을 안내해야 합니다. 3. 별표로 표시된 필드의 셀을 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 필드 중앙 어딘가에 있습니다. 옵션 5 1. 처음에 로봇이 필드의 오른쪽 아래 모서리에 있다고 가정하고 로봇에서 왼쪽 위로 대각선으로 4개의 셀을 그리는 프로그램을 만듭니다.
2. 미로를 통해 초기 위치(◊)에서 A 지점까지 로봇을 안내해야 합니다. 3. 로봇이 필드의 왼쪽 하단에 있다고 가정하고 필드의 셀을 그리는 프로그램을 작성합니다. 6셀 높이의 문자 "T" 형태입니다. 옵션 6 1. *로 표시된 필드의 셀을 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 ◊ 아이콘으로 표시됩니다. 2. 미로를 통해 초기 위치(◊)에서 A 지점까지 로봇을 안내해야 합니다. 3. 로봇이 필드의 왼쪽 하단에 있다고 가정하고 필드의 셀을 그리는 프로그램을 작성합니다. 6셀 높이의 문자 "O" 형태입니다. 옵션 7 1. *로 표시된 필드의 셀을 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 ◊ 아이콘으로 표시됩니다.
2. 로봇을 초기 위치(◊)에서 A점까지 계단으로 이끌어야 합니다. 3. 로봇이 밭의 왼쪽 하단에 있다고 가정하고 밭의 셀을 그리는 프로그램을 작성합니다. 높이가 6셀인 문자 "G"의 형태입니다. 옵션 8 1. 아래쪽 수평 벽을 따라 필드의 모든 셀을 그리는 프로그램을 만듭니다. 처음에 로봇은 필드의 오른쪽 하단에 위치합니다. 2. 로봇을 초기 위치(◊)에서 A 지점까지 계단 위로 안내해야 합니다. 3. 로봇이 밭의 왼쪽 하단에 있다고 가정하고 밭의 셀을 그리는 프로그램을 작성합니다. 높이가 5셀인 문자 "E"의 형태입니다. 옵션 9 1. 오른쪽 수직 벽을 따라 필드의 모든 셀을 그리는 프로그램을 만듭니다. 처음에 로봇은 필드의 오른쪽 상단에 위치합니다. 2. 로봇을 초기 위치(◊)에서 A지점까지 계단을 따라 내려가야 합니다. 3. 로봇이 밭의 왼쪽 하단에 있다고 가정하고, 밭의 셀을 그리는 프로그램을 작성해 주세요. 6셀 높이의 문자 "P" 형태입니다. 1. 처음에 로봇이 필드 중앙 어딘가에 있다고 가정하고 로봇에서 오른쪽 대각선으로 3개의 셀을 그리는 프로그램을 만듭니다. 옵션 10
2. 로봇을 초기 위치(◊)에서 A 지점까지 복도를 따라 양쪽 복도를 바라보며 안내해야 합니다. 3. 로봇이 필드의 왼쪽 하단에 있다고 가정하고, 필드의 셀을 문자 "W" 형태로 4셀 높이로 그리는 프로그램을 작성합니다.
패턴 생성 시 사이클 사용 방법 1 패턴을 그리는 프로그램을 생성합니다. 로봇의 초기 위치는 ◊ 기호로 표시됩니다. 방법 2 패턴을 그리는 프로그램을 만듭니다. 로봇의 초기 위치는 ◊ 기호로 표시됩니다. 방법 3 패턴을 그리는 프로그램을 만들어 보세요. 로봇의 초기 위치는 ◊ 기호로 표시됩니다. 방법 4 패턴을 그리는 프로그램을 만들어 보세요. 로봇의 초기 위치는 ◊ 기호로 표시됩니다. 방법 5 패턴을 그리는 프로그램을 만들어 보세요. 로봇의 초기 위치는 ◊ 기호로 표시됩니다. 옵션 6
패턴 그리기 프로그램을 만듭니다. 로봇의 초기 위치는 ◊ 기호로 표시됩니다. 방법 7 패턴을 그리는 프로그램을 만들어 보세요. 로봇의 초기 위치는 ◊ 기호로 표시됩니다. 방법 8 패턴을 그리는 프로그램을 만들어 보세요. 로봇의 초기 위치는 ◊ 기호로 표시됩니다. 방법 9 패턴을 그리는 프로그램을 만들어 보세요. 로봇의 초기 위치는 ◊ 기호로 표시됩니다. 방법 10 패턴을 그리는 프로그램을 만들어 보세요. 로봇의 초기 위치는 ◊ 기호로 표시됩니다.
필요한 것
- 신분증.
- 운전 면허증.
- 기술 장비 여권(필요한 경우).
- 위임장(시민이 소유자가 아닌 경우)
- 차량의 소유권을 증명하는 서류입니다.
- 자동차(트레일러) 소유자의 의무 민사 책임 보험에 대한 보험 정책입니다.
서비스 주문 방법
개인 계정의 표준 승인 절차를 따르세요. "서비스 카탈로그"에서 내무부를 찾고 서비스 목록에서 "러시아 연방 내무부의 국가 도로 안전 검사관에 자동차 및 트레일러 등록을 위한 국가 서비스" 행을 선택합니다( 서비스 목록의 두 번째 항목). 페이지가 열리면 왼쪽에 10개의 서비스 목록이 나타납니다. 이러한 모든 서비스에 대한 신청서 작성 원칙은 동일합니다. 따라서 목록의 첫 번째 서비스인 "새 차량 또는 중고 차량 등록"을 사용하여 이를 올바르게 수행하는 방법을 보여 드리겠습니다.
1단계. 동의.'서비스 받기' 버튼을 클릭하시면 서비스 신청 절차를 안내하는 창이 나타납니다. 빨간색 별표가 표시된 모든 필드를 작성해야 한다는 점을 상기시켜 드립니다. 표시된 박스를 체크하신 후 “다음” 버튼을 클릭하시면 다음 단계로 진행됩니다.
합의
2단계. 서비스 옵션을 선택합니다.이 페이지에서는 모든 필수 필드를 하나씩 입력합니다. 목록(라인의 흰색 필드를 클릭하면 팝업 창)에 표시된 항목에서만 선택이 이루어집니다. 샘플은 아래와 같습니다.
서비스 옵션 선택
귀하의 위치
서비스 옵션
단계. 3 개인 데이터.이 페이지를 작성하는 원칙은 이전 페이지와 동일합니다. 모든 필수 필드를 채우십시오. 줄의 흰색 필드에 "선택"이라는 단어가 포함되어 있으면 팝업 목록에서 필요한 것을 선택하십시오. 이 단계 이후의 위임장 데이터 페이지는 필요한 경우에만 완료됩니다.
개인 정보
신분증
문서 유형
거주지 주소
4단계. 위임장.소유자가 아닌 경우 이 페이지를 작성해야 합니다.
Step 5. 차량정보.여기에서 모든 필드를 주의 깊게 작성해야 합니다. 별표가 표시되지 않은 필드는 필수가 아닙니다.
이전 게시물에서 나는 이미 러시아 과학 인용 색인이 전자 과학 도서관 서비스 Elibrary.ru에 의해 계산된다고 썼습니다. RSCI를 찾으려면 먼저 이 서비스에 등록하고 자신에 대한 정보를 최대한 정확하게 제공해야 합니다.
1. RSCI를 계산하기 위해 Elibrary.ru에 등록하는 방법은 무엇입니까?
등록 옵션에는 일반 사용자 등록과 작성자 등록의 두 가지가 있습니다. 두 번째에는 첫 번째가 포함됩니다. 먼저 사용자로 등록한 다음 작성자로 등록하거나 즉시 확장된 설문지를 작성하세요.
이렇게 하려면 다음으로 이동하세요. 등록 페이지별표가 표시된 모든 필드를 주의 깊게 작성하세요.
이름 외에도 필드에 설명과 힌트가 있습니다. 이를 보려면 각 필드 옆에 있는 물음표 위로 마우스를 가져가세요.
선택 또는 추가 버튼이 있는 경우 해당 버튼을 클릭하고 기본 설문지 상단에 나타나는 양식을 작성하세요. 예를 들어, 다음 양식에서 왼쪽에는 조직의 전체 이름을 수동으로 입력하고 오른쪽에는 해당 조직이 위치한 도시를 선택합니다. 그런 다음 검색을 클릭하고 목록에서 원하는 조직을 선택합니다(한 개만 발견된 경우 클릭합니다. 이것이 기본 양식 필드에 표시되는 유일한 방법입니다).
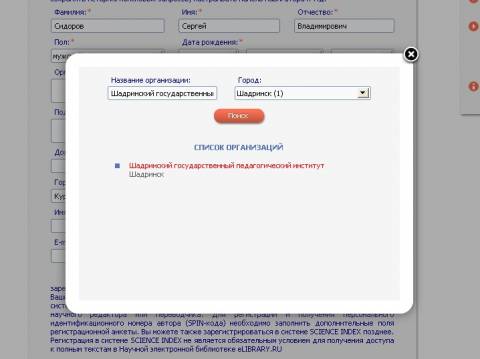
이후에는 추가 양식을 닫을 수 있습니다.
사용자 양식이 끝나면 "과학 색인 시스템에 저자로 등록" 옆에 있는 확인란을 선택하고 계속해서 저자로 작성하세요.

별표가 표시된 항목을 모두 입력한 후 저장 버튼을 클릭하는 것을 잊지 마세요.
2. 별표가 없는 부분도 중요합니다!
별표가 표시되지 않은 항목은 즉시 입력할 필요가 없으며 나중에 동일한 페이지에 이름과 비밀번호를 사용하여 로그인하여 편집할 수 있습니다. 그러나 작성을 지연할 필요는 없습니다. 그렇지 않으면 RSCI가 오랫동안 미스터리로 남아 있을 것입니다.
저널 필드를 반드시 작성하십시오(기성 RSCI 목록에서 추가됨).
다른 조직에서 일했거나 일한 적이 있는 경우 조직 필드에 다른 조직을 입력합니다(일부 출판물이 다른 조직을 나타내는 경우 작업을 가장 잘 인식하는 데 필요함).
같은 이유로 양식에는 이전 성(결혼 전 성) 필드가 포함되어 있습니다.
3. 결과는 얼마나 기다려야 하나요?
하지만 모르겠어요 !!! 어쨌든 최신 웹 서비스에서 기대하는 것만큼 결과가 빨리 준비되지는 않습니다! 무엇을 기다리고 있었나요? 이것은 Yandex 또는 Google이 아닌 진지한 러시아 과학 서비스입니다! 개발자들은 제한된 예산으로 인해 수동 데이터 처리를 수행할 수 없다고 심각하게 불평합니다. 나는 결과를 너무 오랫동안 기다렸기 때문에 사서 소녀들이 나무 상자에 담긴 종이 양식을 힘들게 분류하는 모습을 한 번 이상 상상했습니다.
엄밀히 말하면 정보는 10일 이내에 처리된다고 합니다. 그러나 이는 별표가 없는 필드를 무시하지 않은 경우에 제공됩니다. 몇 주 후에도 결과가 없으면 등록 양식 작성의 완전성과 정확성을 확인하고 필요한 경우 키워드 편집, 주제별 루브릭 섹션 추가, 저널 등을 변경합니다. 편집 후 RSCI는 거의 즉시 결정되어야 합니다.
elibrary.ru 웹사이트 왼쪽 메뉴에서 저자 검색을 클릭하세요(또는 이 링크), 열리는 양식을 작성하고 검색을 클릭하세요.
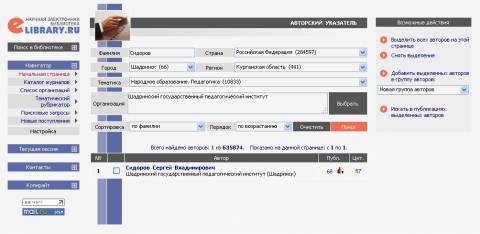
주요 숫자인 출판물 수와 인용 수는 오른쪽 하단에 있습니다. 이 번호 중 하나를 클릭하면 해당 출판물 목록이 열립니다.
등록되지 않은 사용자도 보기 옵션을 사용할 수 있습니다. 등록이나 승인 없이도 모든 과학자의 RICN을 확인할 수 있습니다. 단, 과학자 자신이 Elibrary.ru에 저자로 등록되어 있어야 합니다.
위치
공개 단체전 및 개인전 개최에 대하여
파워리프팅과 네이키드 벤치프레스의 경우,
포돌스크와 모스크바 지역
1. 목표와 목적
· 포돌스크 및 모스크바 지역에서 파워리프팅 대중화를 위한 대회 개최
· 신체적으로 발달된 젊은 세대를 양육하고 건강한 생활방식을 장려합니다.
· 체계적인 체육 및 스포츠에 청소년 참여
· 청소년 및 청소년의 체육교육 참여 동기 부여
· 포돌스크 및 모스크바 지역 선수들의 스포츠맨십 향상
· 포돌스크 및 모스크바 지역의 가장 강력한 선수 식별
· 포돌스크에서 열리는 공개 팀 파워리프팅 대회에서 공연할 팀 구성
2. 날짜와 장소
대회는 2013년 11월 16일 문화 궁전에서 5월 1일 모스크바 지역, Klimovsk, Zavodskaya 거리, 3에서 개최됩니다. 대회 시작 및 계체량은 추가 안내(이메일 또는 SMS)를 통해 안내됩니다.
3. 조직과 리더십
대회의 일반 조직은 MU 청소년 시민 및 애국 교육 센터 "Fakel"과 "Good Lift" 체육관에서 수행하며 전 러시아 연합 조직 "Combat Brotherhood"의 Podolsk 지점이 참여합니다. ” 및 “건강한 국가” 자선 재단.
직접적인 감독은 Fakel MU Popov S.A.의 체육 체조 코치와 Good Lift 체육관 P.S. Yakovlev의 디렉터가 수행합니다. 그리고 "건강한 나라" 자선 재단의 대표인 I.F. 라봇킨.
4. 대회 참가자
관심 있는 단체 및 기관은 물론, 16세 이상이고 개인적으로 대회 참가 신청서를 제출한 개인 선수들도 대회에 참가할 수 있도록 초대됩니다.
주최측은 나중에 선수에게 의무적으로 통지(이메일 또는 SMS를 통해)하여 대회 참가 기준을 발표할 권리를 보유합니다.
주최측은 지원자 수가 초과할 경우 늦어도 2013년 11월 9일까지 대회 참가 기준을 발표할 권리를 보유하며, 오픈 소스에 정보를 게시하고 SMS 및 이메일 메시지를 보내 선수에게 의무적으로 알릴 수 있습니다. .
5. 대회 개최 절차 및 신청서 제출 조건
대회 참가 신청서는 2013년 11월 9일 이전에 이메일로 제출해야 합니다. [이메일 보호됨]또는 +79099250337번으로 SMS 메시지를 보내세요(SMS 비용은 통신업체에서 보내는 SMS 메시지 비용과 같습니다).
주목!올바른 신청서는 부록 1을 참조하세요.
6. 우승자를 결정하는 절차
주목!대회 심사는 IPF 규칙에 따라 수행됩니다(부록 2 참조).
대회는 오픈 연령 카테고리(오픈)로 진행됩니다.
개인전에서:
여성절대체중 부문에서 경쟁할 경우 승자(1위-2위-3위)는 Wilks 공식에 따라 결정됩니다.
우승자 남성의 경우에서 결정됩니다 카테고리최상의 결과를 얻으려면 최대 75kg, 최대 90kg, 최대 110kg 및 110 이상입니다. 우승자 순수한트라이애슬론과 벤치프레스의 챔피언십(1-2-3위를 차지한 선수)은 Wilks 공식에 따라 결정됩니다.
팀 챔피언십에서는남성 팀원 중 가장 좋은 결과 4명과 여성 결과 1명이 고려됩니다.
포인트는 다음 방식에 따라 부여됩니다.
1위 - 6점
2위 - 4점
3위 - 3점
4위 - 2점
5위 - 1점
팀 챔피언십의 승자는 모든 팀 중 최대 점수를 획득한 팀입니다.
7. 우승자 포상식
개인전과 단체전에서 후보로 1~3위를 차지한 우승자와 입상자에게는 기념 증서와 메달이 수여됩니다.
8. 자금조달
우승자를 조직하고, 진행하고, 보상하는 데 관련된 비용은 대회 주최자, 관심 있는 조직 및 후원자가 부담합니다. 참가자의 여행 및 식사와 관련된 비용은 파견 기관에서 부담합니다. 입장료는 없습니다.
부록 1
샘플 신청서(이메일 또는 SMS로 전송):
1. 지명: 예를 들어 벤치 프레스 또는 철인 3종 경기.
2. 팀명 또는 개인 표기 *
3. 성명 *–
4. 생년월일 *–
6번째 숫자 *–
7. 최고의 결과 * (지난 6개월 동안) -
8. 나이* -
9. 코치 -
10. 연락 가능한 전화번호(휴대전화 선호)* -
별표 (*)로 표시된 입력란이 필요합니다.
주목!대회 당일 모든 참가자는 의사가 인증한 비자와 여권 또는 신분증(면허증, 군인 신분증)을 소지해야 합니다. 이러한 서류가 없으면 선수는 대회에 참가할 수 없습니다.
부록 2
대회 규칙:
- 대회에서의 공연은 장비(프레스 셔츠, 작업복, 파워리프팅용 무릎 붕대)를 사용하지 않고 진행됩니다.
- 사용할 수 있는 것: 손목 붕대, 벨트(최대 벨트 폭 – 10cm).
- 필요한 경우 비지지 붕대(한 쪽 다리나 팔에)를 사용할 수 있습니다. 비지지 붕대는 일반적인 의료용 붕대입니다. 붕대는 사용하기 전에 판사에게 제시해야 합니다.
- 운동은 IPF 규칙에 따라 수행됩니다.
스쿼트(규칙 및 실행 순서).
바를 제거한 후(보조자가 도움을 제공할 수 있음) 선수는 시작 자세를 취합니다.
선수가 시작 위치를 수락한 후 심판은 SIT DOWN(앉아) 명령을 내립니다.
운동선수는 고관절의 다리 상단이 무릎 상단보다 낮도록 스쿼트합니다. 하향 이동 시도는 한 번만 허용됩니다.
선수는 다리의 무릎을 완전히 펴고 독립적으로 수직 자세로 돌아와야 합니다. 두 번 서기(“점프”는 금지됩니다).
선수가 고정 자세를 취하자마자 심판은 바벨을 랙(RACKS)으로 되돌리라는 명령을 내립니다.
- 금지- 운동을 시작하거나 끝낼 때 주심의 신호를 따르지 않는 경우 스쿼트 자세의 바닥에서 두 번 일어서기(점프) 또는 일어선 상태에서 아래로 움직이는 동작. 실수는 무릎 부분에서 다리를 구부리고 고관절 부분의 다리 윗면이 무릎 윗부분보다 낮은 위치로 몸을 낮추는 것입니다.
벤치 프레스(규칙 및 실행 순서)
선수는 등을 대고 누워 머리, 어깨, 엉덩이 전체가 벤치 표면에 닿아야 합니다. 신발의 밑창과 굽은 플랫폼이나 블록의 표면과 접촉해야 합니다(신발의 모양이 허용하는 한).
손가락은 랙 위에 놓인 바를 감싸야 하며, 엄지손가락은 바 주위에 "고정"되어 있어야 합니다. 이 위치는 동안 유지되어야합니다
운동을 수행합니다. 리버스 그립의 사용은 금지됩니다.
다리를 단단히 지지하기 위해 선수는 플랫폼 표면에서 30cm 이하의 평평한 슬래브나 블록을 사용할 수 있습니다.
검지 사이로 측정된 바 위의 손 사이의 거리는 81cm를 초과해서는 안 됩니다(두 검지 모두 81cm 표시 안에 있어야 합니다).
보조자의 도움이 있든 없든 랙에서 바를 제거한 후, 선수는 팔꿈치 부분에서 팔을 완전히 편 상태(“켜짐”)로 선임 심판의 신호를 기다려야 합니다.
프레스를 시작하라는 신호는 선수가 정지 자세를 취하자마자 주어져야 합니다.
위치에 있으면 바가 올바른 위치에 있게 됩니다. 운동을 시작하라는 신호는 START 명령입니다.
신호를 받은 후 선수는 바벨을 가슴까지 내리고 이를 가슴(보통 흉골 기저부)의 고정 위치에 유지해야 하며, 그 후 심판은 PRESS 명령을 내립니다. 그런 다음 운동선수는 바벨을 팔이 곧게 펴지도록 밀어 올려야 합니다. 이 위치에 바를 고정한 후 심판은 RACKS 명령을 내립니다.
- 금지– 심판의 명령을 따르는데 오류가 있는 경우. 운동 수행 시 시작 위치의 변경(벤치에서 머리, 어깨, 엉덩이를 들어 올리거나(분리) 플랫폼이나 블록에서 다리를 움직이거나 바를 따라 팔을 움직이는 경우) 벤치 프레스 중 바벨이 아래로 움직이는 움직임입니다. 운동이 끝날 때 팔을 완전히 펴고 바벨을 쥐어 짜는 것이 부족합니다.
6. 데드리프트(실행 규칙 및 순서)
선수는 플랫폼 앞쪽을 향해야 합니다. 선수의 다리 앞에 수평으로 위치한 바벨을 양손으로 자유롭게 쥐고 선수가 똑바로 설 때까지 올라간다.
데드리프트에서 바벨을 들어 올린 후에는 무릎을 완전히 펴고 어깨를 뒤로 당겨야 합니다.
판사는 DOWN 명령을 내립니다.
바벨을 들어올리거나 들어올리려는 의도적인 시도는 접근 방식으로 간주됩니다. 리프트가 시작되면 리프터가 무릎을 완전히 펴고 수직 위치에 도달할 때까지 바벨을 아래로 움직일 수 없습니다. 어깨를 뒤로 당길 때 바가 처진다고 해서 들어올린 무게를 계산하지 않을 이유는 없습니다.
- 금지– 최종 위치에 도달할 때까지 하향 이동. 들어 올리는 동안 허벅지로 바벨을 지탱합니다. 뒤로 또는 앞으로 이동합니다. 명령에 따라 바벨을 내립니다. 하향 명령을 실행할 때 바벨을 손에서 뗍니다.





